Surveying, investigation apparatus - narrow multi-beam
Sonar name | Kongsberg EM2040 | Seabat T50-P |
Frequency | 200kHz - 400kHz | 190kHz - 400kHz |
| Maximum suwasu fuku | 140 degrees | 150 degrees (equal interval dispatch), 165 degrees (angle dispatch) |
| The biggest suwasu range | It is double with the depth of the water at suwasu corner 90 degrees | It is double with the depth of the water at suwasu corner 90 degrees |
| Beamwidth | 0.65 degrees *0.65 degree (400kHz), 1.3 degrees *1.3 degree (200kHz) | 0.5 degrees *1 degree (400kHz), 1 degree X 2 ° (200kHz). |
| The number of the beams | 400 | 1,024 |
| Maximum sounding score (the number of Ping rate X beams) | 20,000 points | 51,200 points |
| Range resolving power | 1.06㎝ | 0.6㎝ |
| Ability for biggest sounding | 300m (400kHz) 600m (200kHz) | 200m (400kHz) 400m (200kHz) |
| The pulse head (CW) | 50μs, 100μs, 200μs | 15-300μs |
| The pulse head (FM) | 0.25ms | - |
| Ping rate | 50Hz | 50Hz |
| Roll precision | 0.08 degrees | 0.008 degrees (at the time of use of RTK) |
| Pace precision | 0.08 degrees | 0.008 degrees (at the time of use of RTK) |
| Yaw precision | 0.05 degrees | 0.015 degrees (at the time of use of RTK) |
| Sounding pattern | Equal angle, equidistance, high density | Equal angle, equidistance, high density |
| Underwater echo gram | Memorable | Memorable |
| Transducer type | Flat type | Flat type |
| Gross weight | 131.0㎏ | 13.6㎏ |
| Possession number | 1 | 1 |
... main features ...
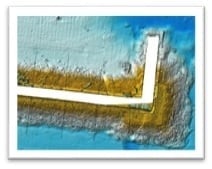
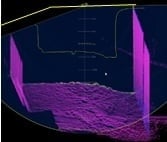
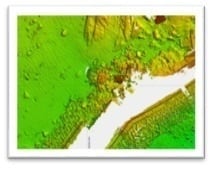
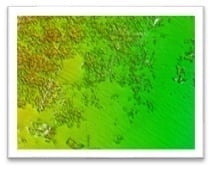
The multi-beam depth finder transmits a sound beam into a fan form and can acquire sounding data for an aspect as three-dimensional data while receiving it. I can grasp the underwater structure and topography visually and generally and can show an effect in marine topography investigation, disaster, accident investigation, management of the harbor construction, i-Construction in the harbor.
Kongsberg EM2040
●The sounding in middle depth sea areas 400m or more is possible by transmitting an FM chapu wave
●By a noise reduction function of the seafloor topography information system, the real-time data cleaning of sounding data is possible
●The sounding in middle depth sea areas 400m or more is possible by transmitting an FM chapu wave
●By a noise reduction function of the seafloor topography information system, the real-time data cleaning of sounding data is possible
Seabat T50-P
●I incline the sonar 15 degrees and make rigging, and a measurement is possible to the surface of the water neighborhood by tipping a beam on software.
●It increases measurement scores by catching plural points in a 1 sound borderline using a multi-detect function and can perform the measurement that evaded the complicated topography or school of fish.
●I raise the density in the range of the option in suwasu by using a flexible mode function and can measure subjects of survey in detail
●I incline the sonar 15 degrees and make rigging, and a measurement is possible to the surface of the water neighborhood by tipping a beam on software.
●It increases measurement scores by catching plural points in a 1 sound borderline using a multi-detect function and can perform the measurement that evaded the complicated topography or school of fish.
●I raise the density in the range of the option in suwasu by using a flexible mode function and can measure subjects of survey in detail